






XT16 / XT32
XT32M
QT128

OT128
AT128

FT120
Principe de fonctionnement
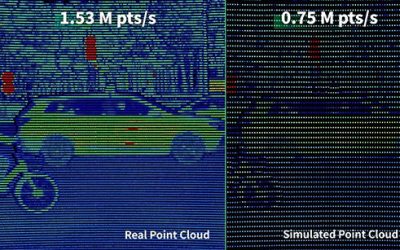
Mesure laser par Temps de vol / Time of Flight
Mesure laser par Temps de vol / Time of Flight
Mesure laser par Temps de vol / Time of Flight
Mesure laser par Temps de vol / Time of Flight
Solid-state
Solid-state
Nombre de faisceaux
16 / 32
32
128
128
128
120
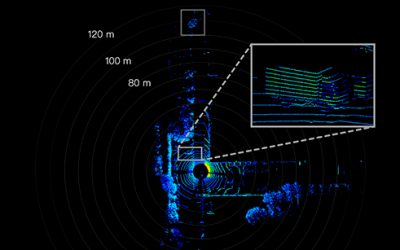
Portée
0,1 m à 120 m
0,1 m à 120 m
0,05 m à 50 m
0,3 m à 200 m
200 m
0,1 m à 100 m
Ouverture verticale
31°
40,3°
105,2°
40°
25,4°
75°
Résolution verticale
2° / 1°
1,3°
0,4°
0,125°
0,2°
0,625°
Résolution horizontale
0,18°
0,18°
0,4°
0,1°
0,1°
0,625°
Précision
+/-1 cm
+/-1 cm
à 100 m
+/-3 cm
+/-5 cm
+/-5 cm
Mode retour
Double-Echo
Double-Echo
Double-Echo
Double-Echo
Double-Echo
Double-Echo

JT16

JT128
Principe de fonctionnement
Mesure laser par Temps de vol / Time of Flight
Mesure laser par Temps de vol / Time of Flight
Nombre de faisceaux
16
128
Portée
30 m à 100 m
30 m à 60 m
Ouverture verticale
40°
-
Résolution verticale
2,67°
-
Résolution horizontale
0,6°
-
Précision
+/-3 cm
-
Mode retour
-
-
{kind=link}
{kind=link}