Agenda
Journée Technique ROBOTIQUE & INDUSTRIE 2026
L’événement parisien de CADDEN revient pour une 2ème édition, participez à la Journée Technique ROBOTIQUE & INDUSTRIE 2026. Découvrez les innovations à la pointe de






L’événement parisien de CADDEN revient pour une 2ème édition, participez à la Journée Technique ROBOTIQUE & INDUSTRIE 2026. Découvrez les innovations à la pointe de

L’événement phare de CADDEN fait son retour pour une 3ème édition, participez à la Journée Technique FLUVIALE & MARITIME 2026. Découvrez les innovations à la

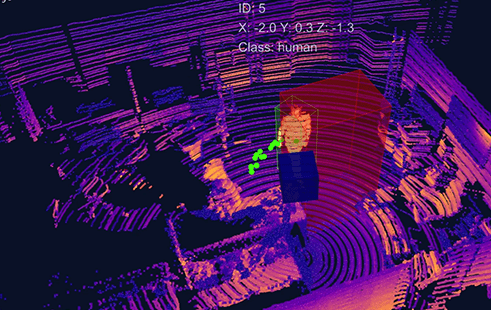
Lidar : définition, fonctionnement, comparatif Lidar 2D vs Lidar 3D, applications…