
Zoom sur
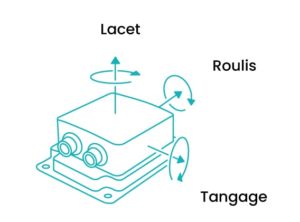
Le Lidar
Lidar : définition, fonctionnement, comparatif Lidar 2D vs Lidar 3D, applications…





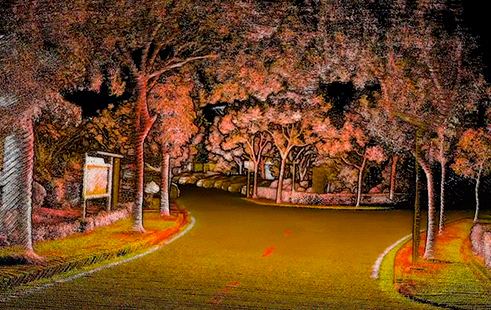

Lidar : définition, fonctionnement, comparatif Lidar 2D vs Lidar 3D, applications…

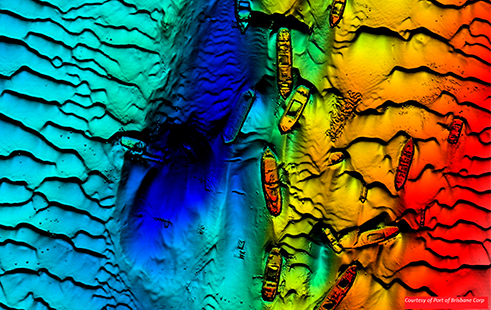
CADDEN devient distributeur officiel des drones sous-marins CHASING en France
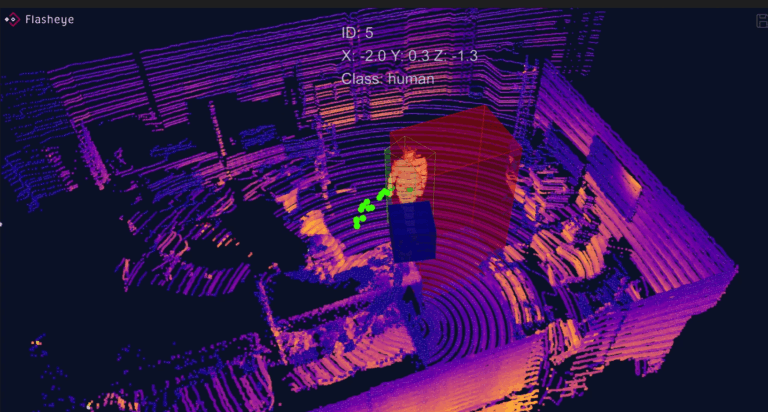
CADDEN annonce devenir le distributeur officiel de Flasheye en France.