Agenda
ROBOTICS & INDUSTRY Technical Day 2026
The Parisian event of CADDEN is back for a 2nd edition, participate in the Technical Day ROBOTICS & INDUSTRY 2026. Discover the innovations at the

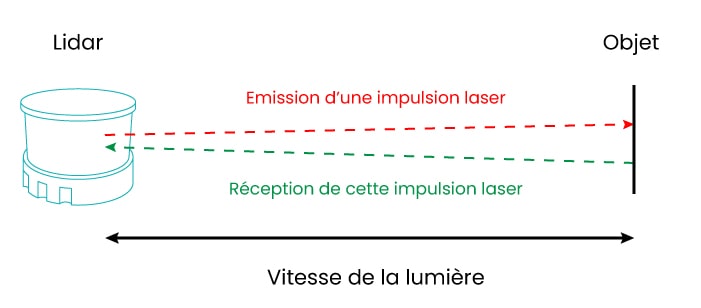
Lidar is a sensor that quickly sends pulses of light, in the form of laser rays, without risk to the human eye (Class 1 Eye Safe), reflected on surrounding objects (tree, pedestrian, car, buildings, etc.) or directly to the ground. The exact distance is calculated by measuring the time it takes the light to move to each object and back to the sensor. Since the speed of light is a constant (about 299 792 458 m/s), the Lidar provides a precise distance between the sensor and an object in real time.
A high-density Lidar sends hundreds of thousands of pulses per second. All these measurements are then collected and processed to create a 3D model of the environment, called a point cloud.
This technology captures millions of data to form a point cloud to represent the studied 3D environment with additional data such as position and shape. Lidars cover ranges from a few meters to a kilometer depending on the model.
The use case of the Lidar will determine the wavelength of the laser. In the context of 3D mapping or obstacle detection, our Lidars operate at wavelengths between 900 and 1550 nm.
Following each laser pulse, a Lidar can pick up several echoes in return, depending on the type of environment in which it is located (bicycle, tree, building, floor, paint, etc.). Each laser pulse received back by the laser sensor reflected back on different surfaces at different distances.
The strongest echo is the first that the Lidar will capture; it can be a pedestrian, a bicycle or a car. As for the weakest echo, it is the farthest; a tree, a building, a construction or a ground.
If we take the example of an environment with vegetation; the Lidar installed on the roof of a vehicle will first scan the leaves of the trees on the sidewalks of a road in downtown, it is the first echo.
The points of its laser beams will not stop there since they will also reach the buildings behind these same trees, this is the second echo. Most Lidar receive several echoes (2 on average, Lidar Neptec by Lumibird receives 7).
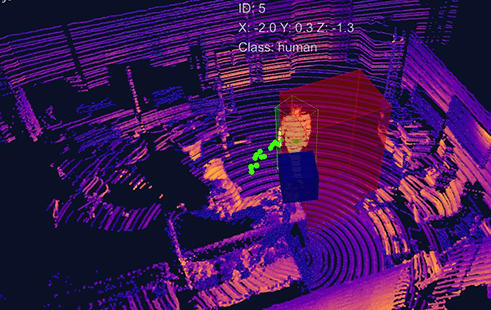
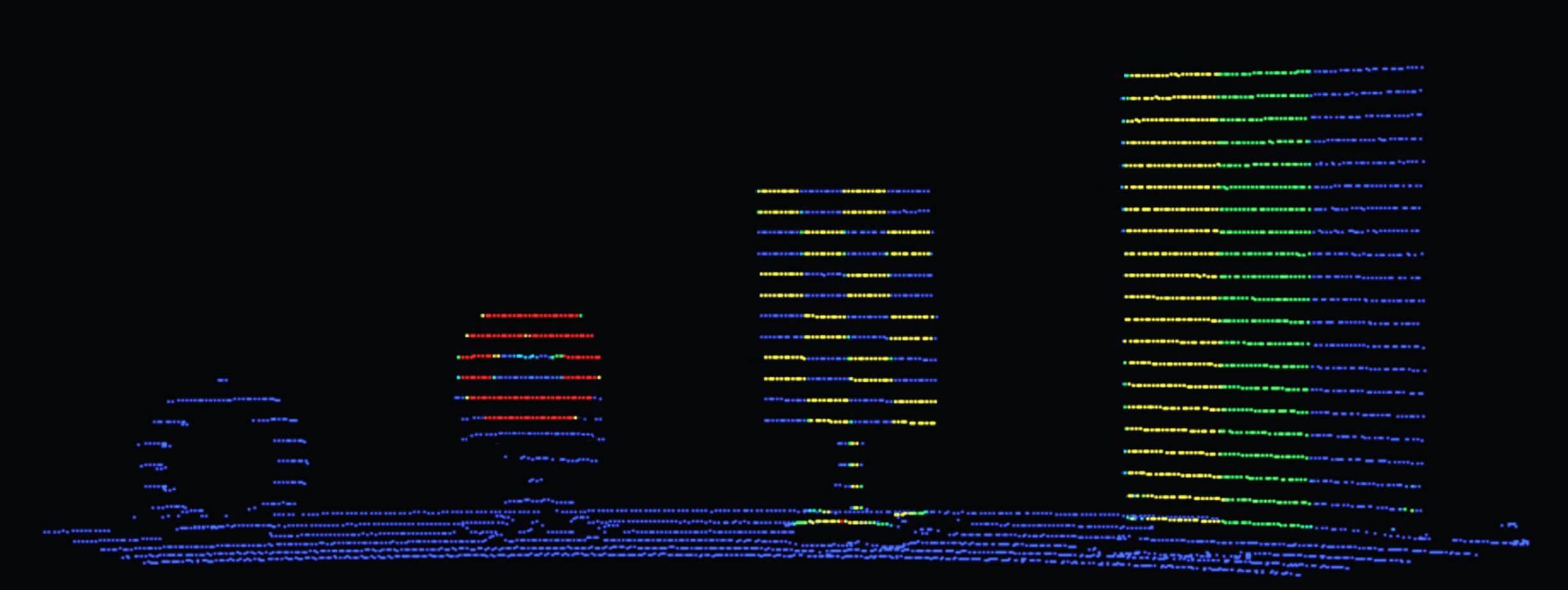
In addition to differentiating several objects, Lidar sensor technology makes it possible to interpret the colours of reflective surfaces. For example, on a road with road markings where there are many elements such as signs, billboards, graffiti, etc.
Image 1: Scenario. Image 2: Data with a Lidar Hesai XT.

A mechanical scanning Lidar is designed to collect data on 360° and often present in research and development services for multiple applications (autonomous navigation, road mapping, bathymetry, etc.).
The hybrid solid-state lidar operates in 1D or 2D and changes the direction of the laser through an internal mobile mirror. This laser sensor is the consumer solution for mass-produced vehicles.
Although the two technologies are similar, RAdio Detection And Ranging uses radio waves to measure the flight time of the reflected signal, using a mobile or fixed antenna. The Lidar principle is different since it uses this same process but by measuring the path made by the laser beams emitted, guaranteeing a better accuracy.
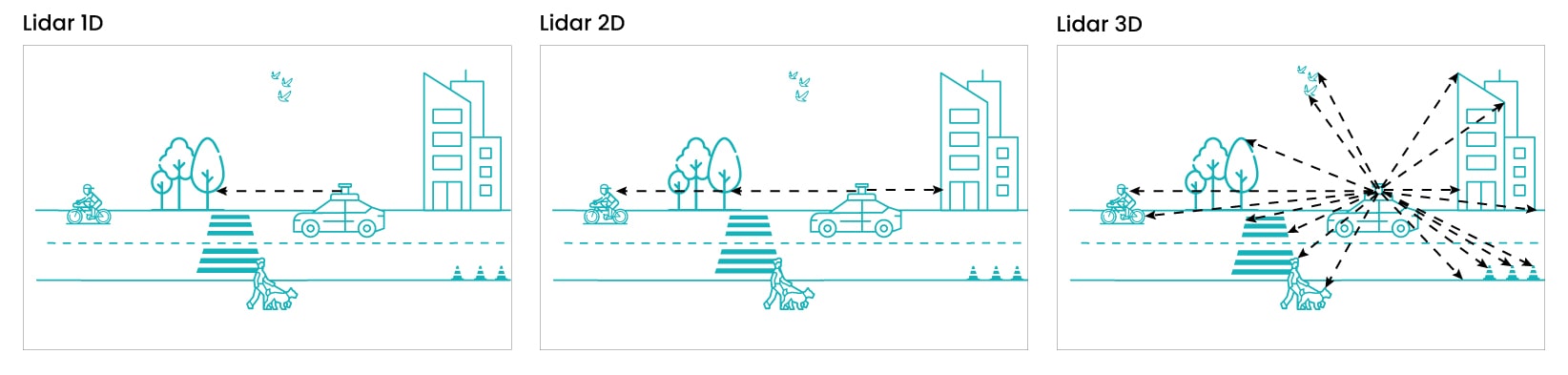
The Lidar 1D sends a single laser pulse on an axis.
The 2D Lidar includes only one laser beam, for detection on a single plane. This laser sensor is mainly used for safety applications (for example for motion detection on a beam from an indoor autonomous vehicle). As part of an autonomous indoor vehicle used in various fields (logistics, distribution, health, etc.), a short-range Lidar 2D laser sensor provides additional precision for human safety (interaction between robots and humans).
The Lidar 3D includes several laser beams (from 16 to 128 according to the models), for simultaneous measurement on several planes.
The laser frequency used, the power of the laser diodes, the range, the measurement rate, the number of echoes are all parameters influencing the accuracy of a Lidar, variable from a few millimetres to a few centimetres. Our Lidar laser sensor ranges provide centimetric precision measurements.
Unlike the ultrasound system, which is too short in range, and the camera, which can only see during the day and in clear weather, the Lidar detects an obstacle several tens of meters away (blind spots, fog, plastic bag, special brightness at sunset, etc.), at night and in rainy weather.
Unlike Lidar and radar, which both operate with electromagnetic waves, sonar uses acoustic waves. This technology propagates sound in water for the detection and localization of objects underwater.

The Lidar is used in numerous and varied applications: robotics for detection and recognition of obstacles, aid in autonomous vehicle navigation, bank mapping, monitoring of sensitive areas and intrusion detection, collision alert, navigation without visibility, etc.
Autonomous agricultural machines equipped with Lidar significantly improve the management of plots. The laser sensor Lidar technology maps environments in 3D: map crops, identify areas of stress (water or nutrient), and even detect diseases. Lidar is also used for biomass monitoring or weed detection, offering unparalleled accuracy compared to traditional methods.
Directly integrated on a USV or hydrographic vessel, the Lidar carries out complete topographies around surface drones during bathymetric surveys. The interest of the Lidar integrated on an aquatic drone is to realize a complete imagery of an environment, by synchronizing the data above and below the water, autonomously and in real time.
Thanks to this combination of sensors, the terrestrial and underwater environment is mapped: banks above water in a port, bridges or coastal habitats. While the echo sounder carries out its bathymetric survey, the Lidar captures its point cloud to create a 3D image of what it perceives in the air.
Military systems use Lidar for ground surveillance, target reconnaissance, or securing sensitive perimeters. The laser sensor technology has the significant advantage of operating in extreme conditions (fog, snow, rain, etc.), making it a key ally for critical operations.
For meteorologists, the Lidar is now an essential tool for studying clouds, measuring winds, and analyzing air quality. This technology contributes to improving weather forecasts, monitoring storms, or detecting fine particles (pollution, volcanic ash). The data collected feed climate models and help to anticipate extreme events.
Recently, researchers have increasingly used Lidar technology for geophysical (tectonic movements) or environmental studies (biodiversity, deforestation).
The Lidar has revolutionized the world of archaeology for the discovery of buried sites and lost cities, without conducting invasive excavations. It reveals ancient structures (villages, roads, tombs, pyramids, ancient villages) under vegetation or soil, and helps preserve heritage by creating 3D models of monuments.


In 2018, the French company Navya was experimenting for a month an autonomous shuttle in the city of Nantes. This was a first for the city, which was temporarily acquiring a self-driving, clean-energy vehicle (although in this test, an agent was present in all vehicles) where a Lidar laser sensor was installed on the front of its roof.

Mobile mapping is a process that includes a vehicle or backpack, equipped with a GNSS system and a Lidar to collect 360° data.
In industrial sites such as warehouses and factories, the automation of logistical tasks by autonomous vehicles (AGV for ‘Autonomous Guided Vehicle’ and AMR for ‘Autonomous Mobile Robots’, pallet trucks) is associated with Lidars, for navigation in warehouses, the detection of shelves, the placement or removal of parcels and pallets, stock inspection, etc. These autonomous robots move safely while taking care to avoid obstacles (pedestrians, rails…), and optimize their journeys.

Monitoring sensitive sites (warehouses, plants, water reserves, etc.) is a key issue for many companies and administrations. Associated with a dedicated application, the Lidar laser sensor is installed in strategic locations to guarantee the safety of the premises as employees, we speak about volumetric detection.
Installed at the entry points of a place (airport, station, park, etc.), the interest of the Lidar is the counting of the number of people who enter and leave the same area. With a volumetric detection application used in addition to the Lidar, the body defines the areas to be monitored using laser sensors associated with intelligent software (for example: SLAM).
The Smart City is a new concept of urban development with the aim of improving the quality of life of city dwellers and promoting the working environment of businesses. The Lidar captures data to create 3D digital twins and thus have precise knowledge of buildings, roads, and electrical networks.
Did you like this article ?
Share it with your colleagues or friends
Read next
ROBOTICS & INDUSTRY Technical Day 2026
The Parisian event of CADDEN is back for a 2nd edition, participate in the Technical Day ROBOTICS & INDUSTRY 2026. Discover the innovations at the

Technical Day FLUVIAL & MARITIME 2026
The flagship event of CADDEN is back for a 3rd edition, participate in the Technical Day FLUVIAL & MARITIME 2026. Discover the innovations at the

CADDEN becomes an official distributor of CHASING ROVs in France
CADDEN becomes an official distributor of CHASING ROVs in France.